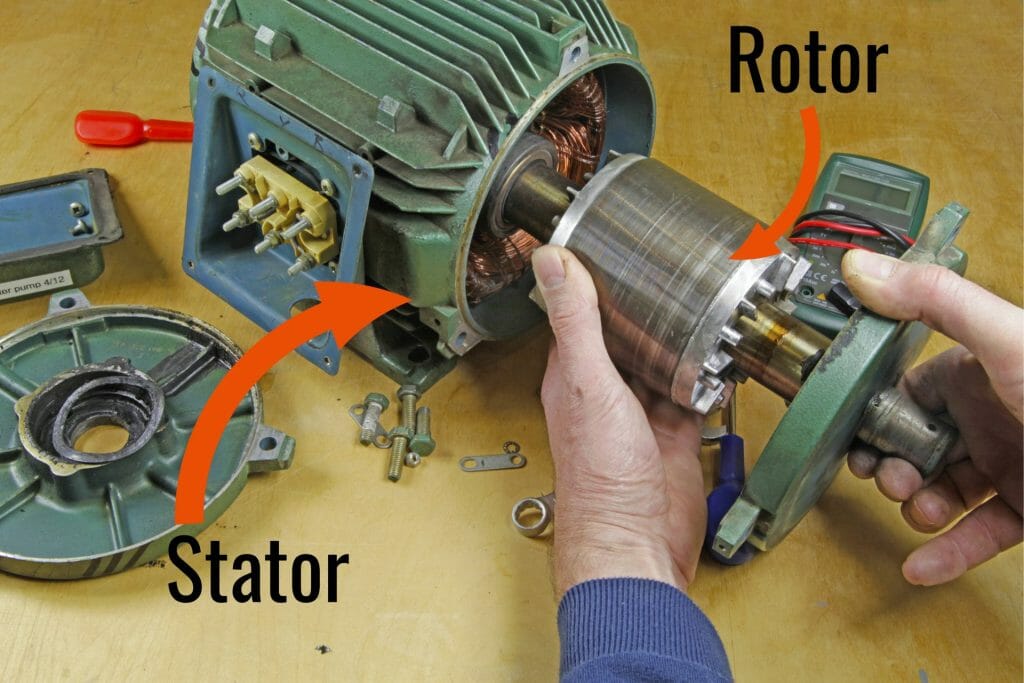
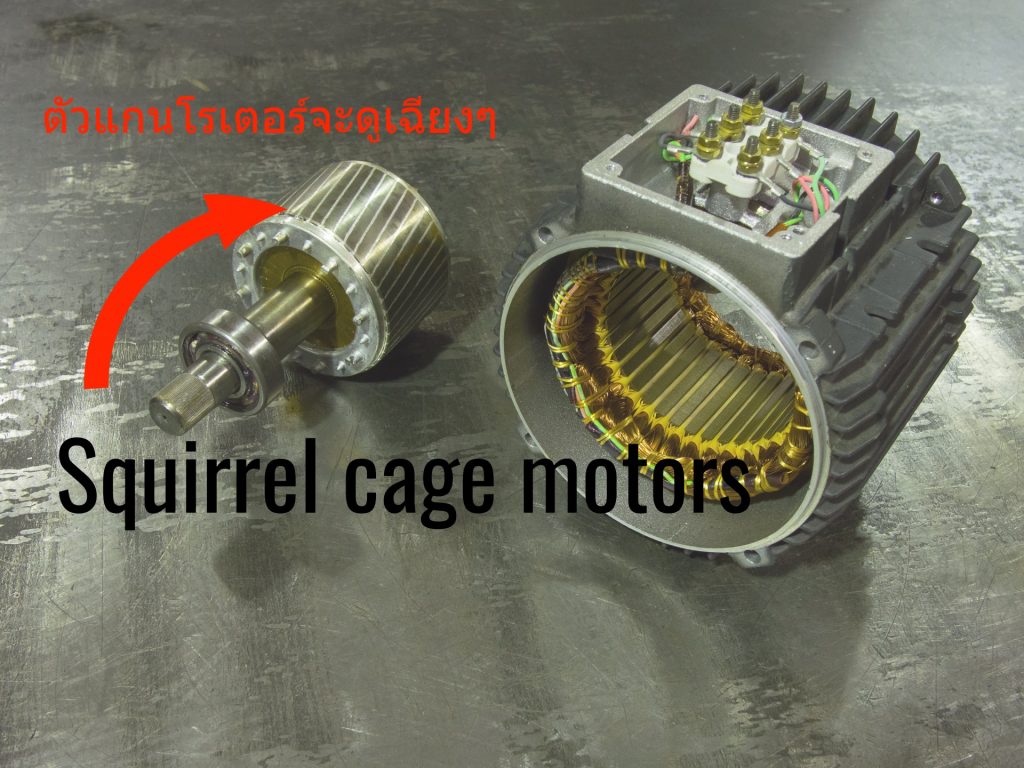
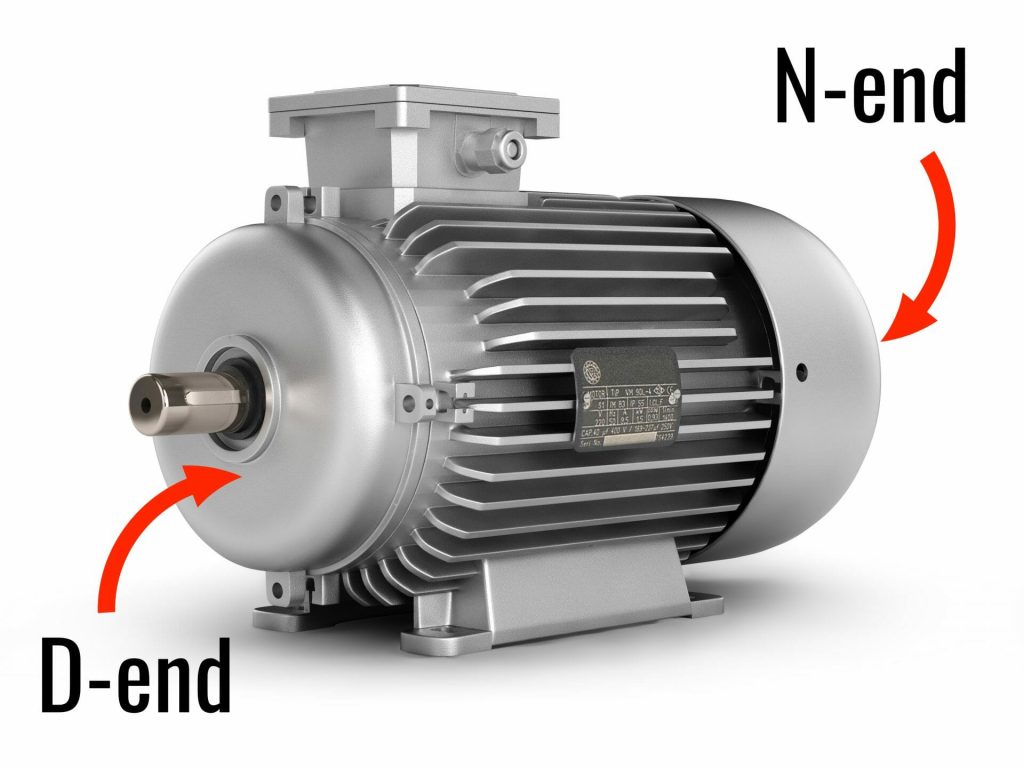
AC Electric Motor คือ เครื่องกลไฟฟ้าที่หน้าที่เปลี่ยนพลังงานไฟฟ้า เป็นพลังงานกล ซึ่งทำหน้าที่หมุนขับเคลื่อนโหลด โดยองค์ประกอบของตัวมอเตอร์ไฟฟ้านั้นจะประกอบไปด้วย 2 ส่วนหลักๆ คือ
การใช้งานตัว AC Induction Motor นั้น เป็นการเปลี่ยนพลังงานจากพลังงานไฟฟ้าให้เป็นพลังงานกล ซึ่งอยู่ในรูปของแรง ซึ่งเราทราบกันดีอยู่แล้วว่า F = m*a ซึ่งเป็นการเคลื่อนที่แบบเป็นเส้นตรง แต่ลำหรับมอเตอร์นั้นพลังงานที่ได้นั้นจะอยู่ในรูปของแรงบิด หรือ Torque โดยหาได้จาก T = F * r หรือแรงบิดมีค่าเท่ากับ แรงคูณด้วยรัศมี ซึ่งมีหน่วยเป็น Nm ในระบบ SI โดยเราจะสามารถแปลงค่ากำลังไฟฟ้า (kW) ไปเป็นค่าแรงม้า (HP) และแรงบิด (Nm)ได้จากสมการ Torque = (HP x 5252)/RPM และมีตัวแปรที่เกี่ยวข้องอยู่ไม่กี่ตัว คือ
kW = 1.732*V*I*PF
1HP = 746 Watts = 2545 BTU = 44742 Nm/m
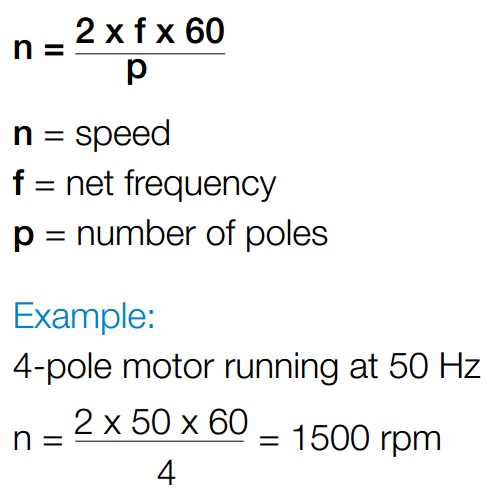
RPM = ความเร็วรอบของมอเตอร์ หรือ Speed
V = แรงดันไฟฟ้า
I = กระแสไฟฟ้า
PF = power factor ตัวประกอบกำลังไฟฟ้า
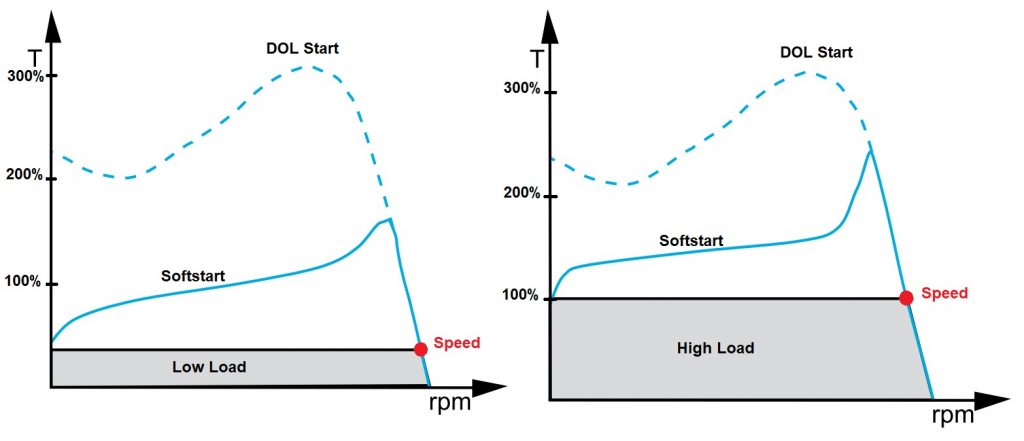
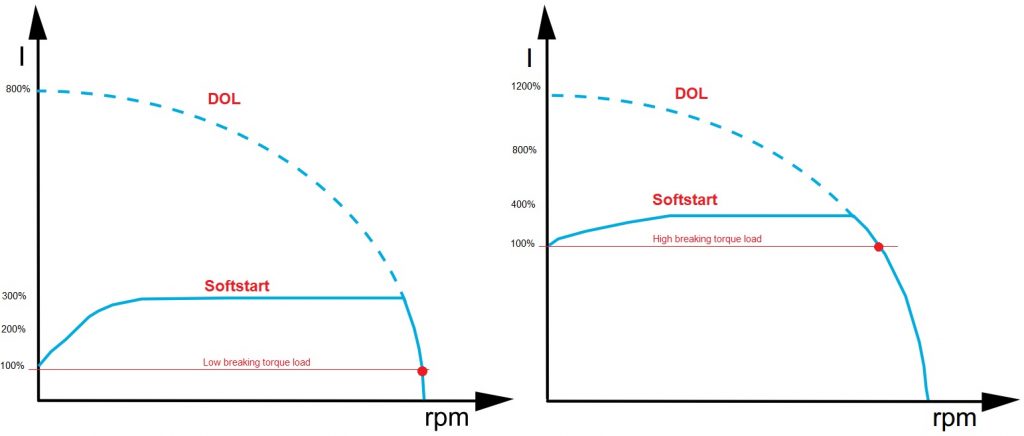
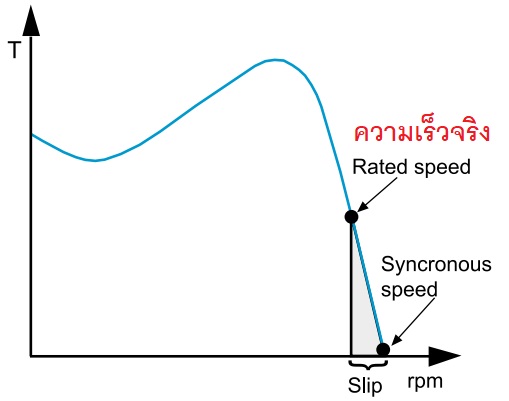
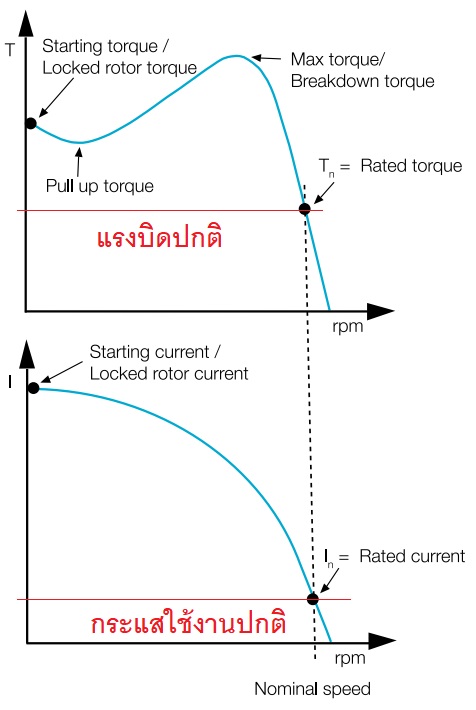
จากสมการ Torque = (HP x 5252)/RPM จะเห็นได้ว่า ค่าแรงม้าซึ่งหาค่าได้จากกำลังไฟฟ้าโดยมีค่ากระแสและแรงดันไฟฟ้าเป็นตัวแปร รวมถึงค่าความเร็วรอบของมอเตอร์นั้นเป็นผลทำทำให้ค่าแรงบิดเปลี่ยนแปลงทั้งสิ้น โดยถ้าเราดูจากรูปด้านบนเราจะพบว่าตัวแรงบิดของมอเตอร์นั้น สัมพันธ์กับค่าความเร็วรอบของมอเตอร์จริงๆ โดยในช่วงออกที่มอเตอร์เริ่มหมุนตัวมอเตอร์จะให้ค่าแรงบิดที่สูงมากถึง 1.5 – 3 เท่าของแรงบิดปกติ ซึ่งเป็นผลมาจากการกินกระแสไฟฟ้าในช่วง Start motor ที่สูง ดังนั้นถ้ามีการ Start motor แบบ DOL จะทำให้เกิดแรงบิดที่ไม่ได้ใช้งานเมื่อเทียบกับโหลดทั้งที่เป็นโหลดเบา และโหลดหนัก ซึ่งแรงบิดที่เหลือเหล่านี้จะทำให้เกิดความเครียดที่ตัวอุปกรณ์ส่งกำลังที่ต่อกับตัวมอเตอร์ และเมื่อความเร็วรอบสูงขึ้นจนเข้าใกล้ความเร็วรอบสูงสุดของมอเตอร์ แรงบิดของมอเตอร์ก็จะตกลงมาสู่ค่าปกติ เราเรียกว่าสภาวะ Steady state
ในทางกลับกันถ้าใช้ตัว Softstart ในการ Start motor โดยการอาศัยวิธีการ voltage ramp up หรือ Torque control ก็จะสามารถลดค่าการเกิดแรงบิดที่ไม่ได้ใช้ลงได้ และยังเป็นการถนอมและยืดอายุการใช้งานอุปกรณืสงกำลังต่างๆ ได้
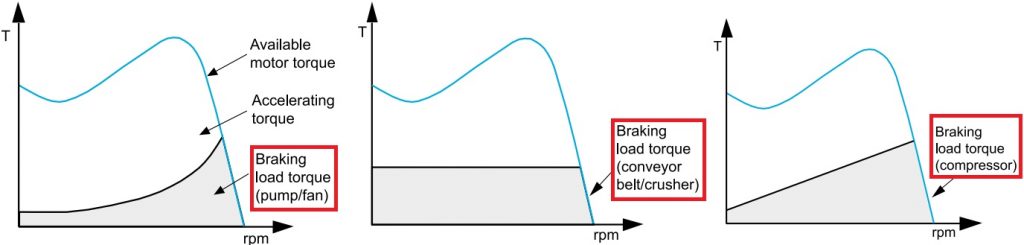
โหลดแบบ Linear เป็นโหลดที่ต้องการแรงบิดของมอเตอร์เพิ่มขึ้นแบบเชิงเส้น ซึ่งในช่วงออกตัวนั้น จะมีภาระโหลดไม่มาก สามารถ Start Motor ได้โดยง่าย ตัวอย่างของโหลดประเภทนี้ได้แก่ เครื่องอัดอากาศแบบคอมเพรสเซอร์
Moment of Inertia
ในการใช้งานตัวมอเตอร์เพื่อหมุนโหลดนั้น สิ่งที่ต้องพิจารณาสำหรับการเลือกขนาดของมอเตอร์นั้นก็คือ Moment of Inertia หรือโมเมนต์ความเฉื่อย เป็นสมบัติอย่างหนึ่งเกิดขึ้นเมื่อวัตถุหมุน โมเมนต์ความเฉื่อยเป็นปริมาณที่บอกความเฉื่อยในการหมุน (Rotational Inertia) ของวัตถุ ในการที่ตัววัตถุต้องการที่จะพยายามรักษาสภาพเดิมของการหมุนเอาไว้ โดยวัตถุมีโมเมนต์ความเฉื่อยมาก ก็จะทำให้วัตถุนั้นเปลี่ยนสภาพของการหมุนเดิมได้ยาก และถ้าวัตถุนั้นมีโมเมนต์ความเฉื่อยน้อยก็จะทำให้วัตถุนั้นเปลี่ยนสภาพของการหมุนเดิมได้ง่าย ซึ่งโมเมนต์ความเฉื่อยของวัตถุมีค่าขึ้นกับแกนหมุน รูปร่างของวัตถุและลักษณะการเรียงตัวของวัตถุรอบแกนหมุน ซึ่งในที่นี้วัตถุที่ต้องการหมุนนั้นก็คือประเภทของโหลดต่างๆ เช่น ใบพัด พูลเล่ โดยเราสามารถหาค่า Moment of Inertia ได้จากสมการ
m = น้ำหนักของวัตถุ (kg)
r = รัศมี (m)
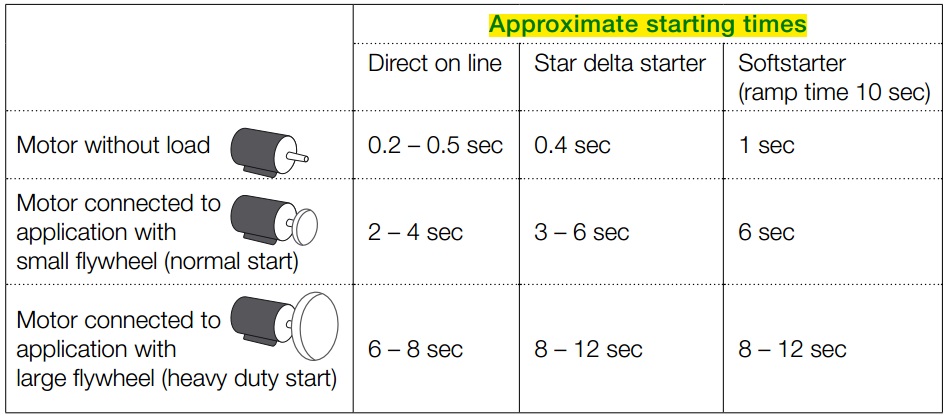
ข้อสังเกตุ จากรูปด้านล่างจะเห็นได้ว่าวัตถุที่มีขนาดใหญ่ น้ำหนักมากก็จะมีค่า Moment of Inertia ที่สูง ต้องใช้แรงบิดมากในการทำให้วัตถุเคลื่อนที่ในทิศทางเป็นวงกลม ดังนั้นในการ Start Motor เพื่อหมุนวัตถุที่มีค่า moment of inertia สูงก็จะใช้เวลามากขึ้นในการ Start Motor เมื่อเทียบกับมอเตอร์ที่มี moment of inertia น้อยกว่า เมื่อใช้มอเตอร์ขนาดเท่ากัน