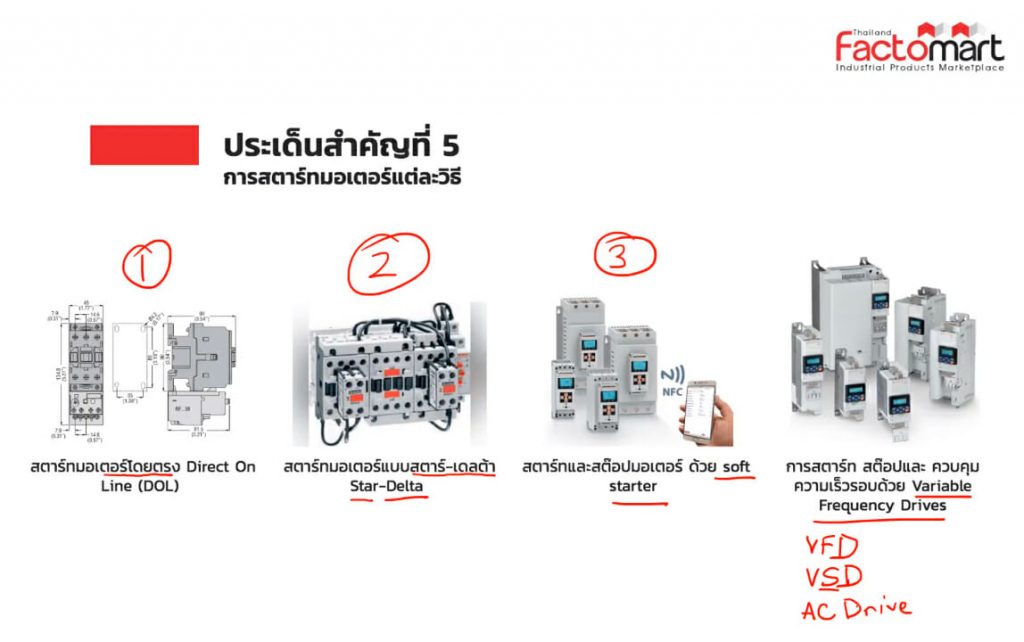
สตาร์ทมอเตอร์ด้วยวิธีไหนดี ? และทำไมต้องมีหลายวิธีนั้น ท่านจะได้ทราบคำตอบจากเนื้อหาในบทนี้ ในการควบคุมมอเตอร์ทั้ง 4 วิธีที่ได้กล่าวมานั้น มีข้อดี ข้อเสียที่แตกต่างกัน ซี่งทางเราได้ย่อยประเด็นที่สำคัญ ในการเลือกวิธีการ start stop มอเตอร์ ได้เป็นดังนี้
การควบคุมมอเตอร์ไฟฟ้าแบบ AC 3 phase Induction motor หรือ Asynchronous motor นั้นสามารถควบคุมให้มอเตอร์เริ่มทำงาน Start motor และควบคุมให้มอเตอร์หยุดทำงาน Stop motor ได้หลากหลายวิธี แต่สำหรับในประเทศไทยที่ใช้ระบบไฟฟ้าแบบ 3 เฟส 380โวลต์ 50Hz จะนิยมใช้การควบคุมมอเตอร์ทั้ง 4 วิธี ซึ่งเนื้อหาในส่วนนี้จะเน้นไปที่เรื่องของข้อดี และข้อเสียในการควบคุมมอเตอร์ในแต่ละวิธี ซึ่งมีรายละเอียดดังนี้