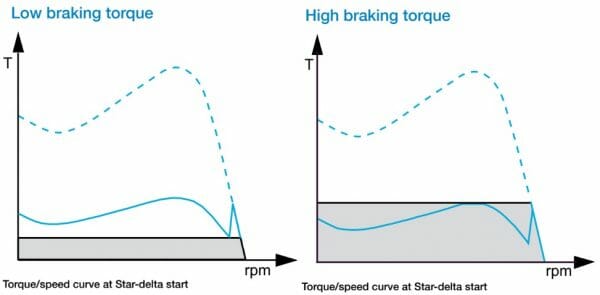
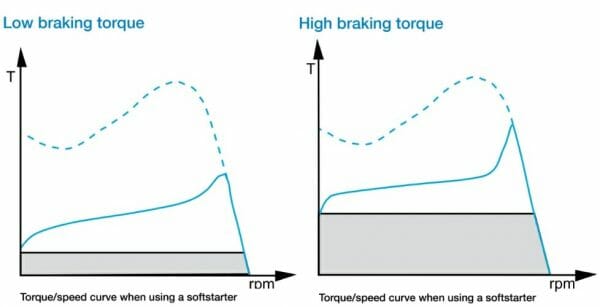
บทที่ 4.4 เปรียบเทียบแต่ละวิธีการสตาร์ทสำหรับระบบสายพานลำเลียง Conveyor Beltvikan2020-07-09T09:28:17+07:00 สำหรับในอุตสาหกรรมนั้นระบบสายพานลำเลียงแล้วจะมีหลากหลายประเภทขึ้นอยู่การประยุกต์ใช้งาน ทั้งนี้มีความยาวตั้งแต่หลักเมตรจนถึงหลักเป็นกิโลเมตรก็มี และยังมีการติดตั้งในแนวนอนหรือแนวเอียงอีก จะเห็นได้ว่าสายพานลำเลียงนั้นมีใช้กันหลากหลายจริงๆ ซึ่งโดยทัวไปแล้วสายพานลำเลียงเป็นโหลดที่มีลักษณะแรงบิดคงที่ (constant load) กับ high braking torque ซึ่งขึ้นอยู่กับลักษณะของโหลด ดังนั้นควรสตาร์ทด้วยวิธีไหนดี ถึงจะเหมาะและคุ้มค่าสุดสำหรับโหลดนี้ สตาร์ทโดย Direct online (DOL) การ start motor ที่เป็นอุปกรณ์ต้นกำลังให้กับสายพานลำเลียงนั้น จำเป็นต้องอาศัยแรงบิดในการเริ่มต้นที่สูง เกือบจะเท่าแรงบิดสูงสุดของมอเตอร์ เพื่อทำให้เกิดค่าแรงบิดที่มากกว่า Breaking torque ของโหลดและทำให้เกิดความเร่ง ซึ่งแน่นอน การ Start Motor แบบ DOL นั้นตอบโจทย์สำหรับโหลดประเภทนี้ แต่แรงบิดที่เกิดขึ้นมักจะมีขนาดมากกว่าพิกัดแรงบิดของมอเตอร์อยู่ 1.5 ถึง 2.5 เท่า ดังนั้นจำเป็นต้องออกแบบตัวอุปกรณ์ส่งกำลัังให้รองรับค่าแรงบิดสูงๆ เหล่านี้ จึงถือว่าเป็นต้นทุนที่สูงสำหรับการออกแบบ สร้าง และการซ่อมบำรุงรักษา สตาร์ทโดย สตาร์-เดลต้า (Star-Delta) หากใช้การสตาร์ทแบบ สตาร์ – เดลต้า สำหรับโหลดที่มีแรงบิดและ braking torque สูงเกือบๆเท่ากับพิกัดแรงบิดของมอเตอร์ โดยที่การสตาร์ทช่วงการต่อแบบสตาร์อยู่นั้น จะทำให้มีแรงบิดต่ำ เนื่องจากช่วงสตาร์ทที่วงจรสตาร์ทำงานจะใช้แรงดันอยู่ประมาณ 58 % ทำให้ได้แรงบิดไม่เพียงพอและส่งผลให้ไม่สามารถทำให้มอเตอร์เริ่มหมุนได้ ดังนั้นการสตาร์ทแบบ สตาร์- เดลต้านั้นเหมาะกับสายพานลำเลียงที่โหลดเบาๆ สตาร์ทโดย ซอฟสตาร์ท (Soft Starter) เมื่อใช้ซอฟสตาร์ทในระบบสายพานลำเลียงนั้น จะช่วยในเรื่องของการลดความเครียดเชิงกลของอุปกรณ์แมคคานิคส์ได้เป็นอย่างดีและสามารถปรับค่าแรงบิดตอนเริ่มสตาร์ทจากค่าที่น้อยที่สุดที่ทำให้สายพานเริ่มเคลื่อนที่ได้ ทั้งนี้ยังลดปัญหาที่เกิดจากการลื่นไถลของสายพาน และยืดอายุการใช้งานของอุปกรณ์แมคคานิก เช่น gearboxes และ couplings เป็นต้น ด้วยเหตุนี้ทำให้ลดค่าใช้จ่ายในการซ่อมบำรุงเป็นอย่างมาก ดาวโหลด PDF ดาวน์โหลดคู่มือ การสตาร์ทและควบคุมมอเตอร์