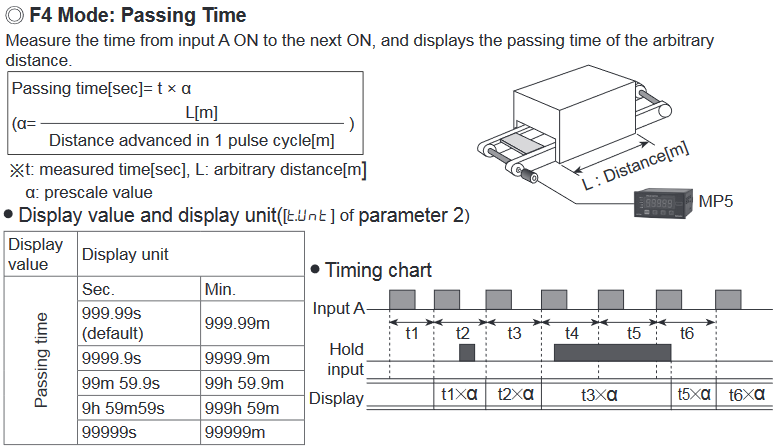
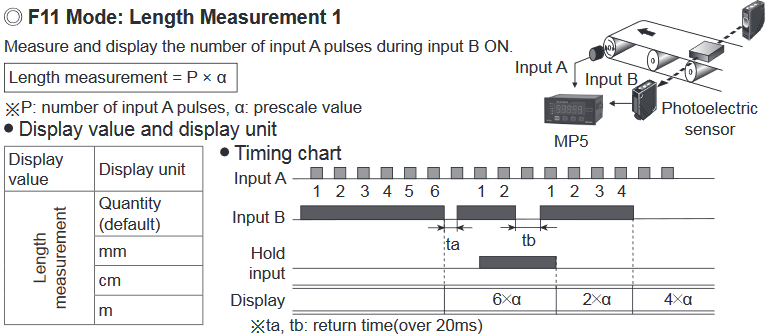
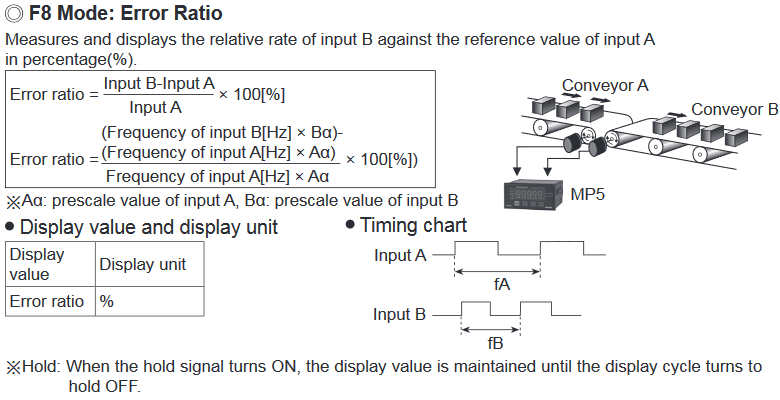
เมื่อเราได้ทราบถึงรูปแบบสัญญาณอินพุตของตัว Digital Pulse Meter แล้ว ก็จะมาถึงในส่วนของรูปแบบการใช้งานตัวมิเตอร์ในการวัดสัญญาณพัลส์เพื่อนำมาแสดงผลในรูปแบบต่างๆ ดังนี้
จะเห็นได้ว่าตัว Digital Tachometer นั้นจริงๆ แล้วมีพื้นฐานมาจากตัว Digital Pulse Meter หรือมิเตอร์วัดสัญญาณพัลส์ซึ่งจะอาศัยการประมวลผลของตัวไมโครโปรเซสเซอร์ และฐานเวลาที่ถูกสร้างขึ้นเพื่อใช้ในการคำนวณค่าต่างๆ ตามที่ต้องการเพื่อนำไปแสดงผล โดยองค์ประกอบของตัวมิเตอร์นั้นจะขอแนะนำในส่วนถัดไป