ดังนั้นในการเลือกใช้งานตัว Temperature Controller หรือตัวควบคุมอุณหภูมิให้ได้มีประสิทธิภาพนั้น เราจำเป็นต้องเข้าใจถึงกระบวนการคิดและการทำงานของตัวควบคุมอุณหภูมิ ซึ่งหัวใจของการควบคุมนั้นก็คงหนีไม่พ้นเรื่องของวิธีการคิดและควบคุมของ Temperature Controller ซึ่งมีอยู่ด้วยกันหลายประเภทดังนี้
ON-OFF Control หรือ Bang-bang Controller
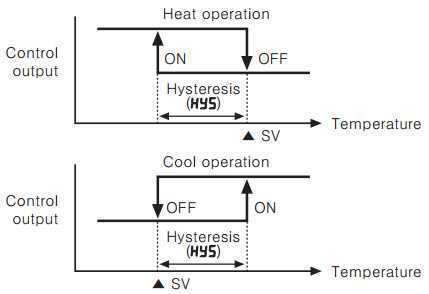
ระบบควบคุมแบบ ON-OFF เครื่องควบคุมจะสั่งเอาท์พุตทำงานเพียง 2 สภาวะเท่านั้น คือ ON และ OFF เป็นการควบคุมแบบง่าย ๆ และราคาไม่แพง ดังนั้นจึงนิยมใช้กันอย่างกว้างขวางในงานควบคุมทางอุตสาหกรรม ในกรณีที่ผลจากการแกว่งของอุณหภูมิเป็นที่ยอมรับได้
กรณีที่อุณหภูมิมีการกระเพื่อมที่ Set point จะมีผลทำให้เอาต์พุตของเครื่องควบคุม ON และ OFF อยู่ตลอดเวลาหรือเกิดการแกว่งของอุณหภูมิอยู่ตลอดเวลา สามารถแก้ไขได้โดยกำหนด Hysteresis เพื่อลดการตัด-ต่อที่เกิดขึ้น แต่ผลเสียคือจะทำให้เกิด Overshoot มากขึ้น
P Control หรือ Proportional Control
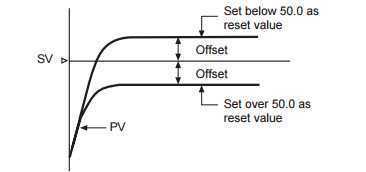
เป็นการควบคุมระบบแบบป้อนกลับโดยใช้ตัวควบคุมแบบสัดส่วน เป็นกระบวนการควบคุมอุณหภูมิที่ออกแบบมาเพื่อแก้ไขปัญหาของการเกิด Overshoot หรือ Undershoot ของอุณหภูมิ แต่ก็ยังไม่สามารถเข้าสู่ค่า Set Point หรือค่าอุณหภูมิที่ต้องการได้ เนื่องจากมีการเกิด Offset Error ที่สถานะคงตัวของระบบ การควบคุมแบบนี้จะช่วยลดค่าความผิดพลาดของระบบ ซึ่งจะสามารถตอบสนองกับค่าสัญญาณความผิดพลาดอย่างทันทีทันใด
PID Control หรือ Proportional Integral Derivative Control
จาก วิธีการคิดและการควบคุมทั้งหมดของ Temperature Controller ที่กล่าวมานั้น ล้วนแล้วแต่เป็นการควบคุมแบบการป้อนกลับ Feedback Control หรือ Close Loop Control System ทั้งสิ้น โดยกระบวนการควบคุมแบบนี้ ปัจจุบันถือว่าเป็นการวบคุมแบบมาตรฐานที่ใช้ในระบบอุตสาหกรรม เนื่องจากสามารถจัดการกับสัญญาณรบกวนต่างๆ และควบคุมระบบให้เข้าสู่ค่าที่ตั้งไว้ได้ดี
ถ้าคุณสนใจสินค้าสามารถ ดูและเลือกซื้อ Temperature Controller เครื่องควบคุมอุณหภูมิ หลากหลายรุ่น จากหน้าเว็บออนไลน์ของเราได้ หรือคุณมีข้อสงสัยหรืออยากสอบถามเพิ่มเติมเกี่ยวกับสินค้า สามารถแชทมาหาเราได้ทันทีจากช่องแชทด้านล่างขวามือ หรือส่งเมลล์มาที่ [email protected] หรือผ่าน Line ที่ @factomart และเบอร์โทร 021-050-567 ได้หลากหลายช่องทาง มีผู้เชี่ยวชาญให้คำแนะนำตลอดเวลาทำการ